
Learning Crowd Motion Dynamics with Crowds
Project information
- Paper:
Bilas Talukdar, Yunhao Zhang, and Tomer Weiss. Learning Crowd Motion Dynamics with Crowds. In 2024 ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games (I3D 2024). Philadelphia, PA, USA. - Read the Paper
- Supplementary Video
- Paper & Video in Publishers Site
- Project URL
- BibTeX:
@article{talukdar:crowds:2024, title = {Learning Crowd Motion Dynamics with Crowds}, author = {Talukdar, Bilas and Zhang, Yunhao and Weiss, Tomer}, year = {2024}, journal = {Proc. ACM Comput. Graph. Interact. Tech.}, volume = {7}, number = {1}, } - Keywords: Crowd Simulation; Reinforcement Learning; Crowdsourcing; Bayesian optimization.
-
- Tools and Languages: C++, Python, OpenGL, Stable baselines, Unity for rendering.
Abstract
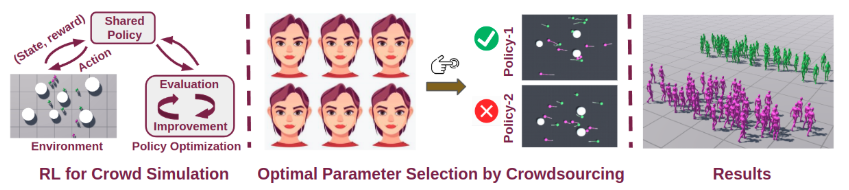
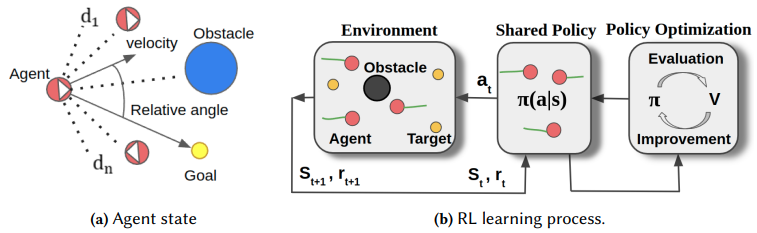
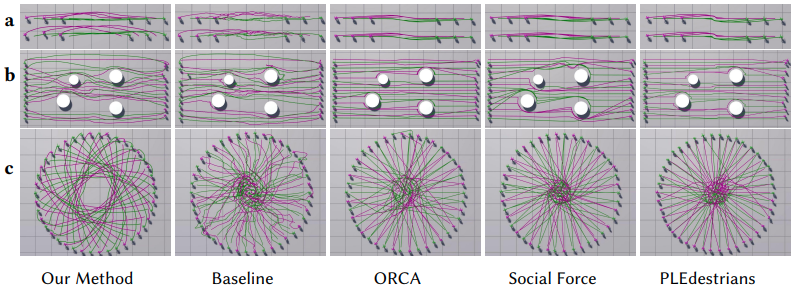
Reinforcement Learning (RL) has become a popular framework for learning desired behaviors for computational agents in graphics and games. In a multi-agent crowd, one major goal is for agents to avoid collisions while navigating in a dynamic environment. Another goal is to simulate natural-looking crowds, which is difficult to define due to the ambiguity as to what is a natural crowd motion. We introduce a novel methodology for simulating crowds, which learns most-preferred crowd simulation behaviors from crowd-sourced votes via Bayesian optimization. Our method uses deep reinforcement learning for simulating crowds, where crowdsourcing is used to select policy hyper-parameters. Training agents with such parameters results in a crowd simulation that is preferred to users. We demonstrate our method's robustness in multiple scenarios and metrics, where we show it is superior compared to alternate policies and prior work.
Below we list the key contributions of our work: